
3d Vector Interpolation

How Do I Plot A Vector Field Within An Arbitrary Plane Using Python Stack Overflow

N Dimensional Interpolation Pimiddy
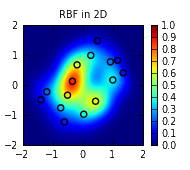
Fast Rbf Interpolation Fitting Alglib C And C Library
How To Linearly Interpolate The Colormap Between Vertices Of A Surface Issue 6027 Matplotlib Matplotlib Github

Fast Interpolation Of Regularly Sampled 3d Data With Different Intervals In X Y And Z Stack Overflow

N Dimensional Interpolation Pimiddy
V contains the corresponding function values at each sample point.
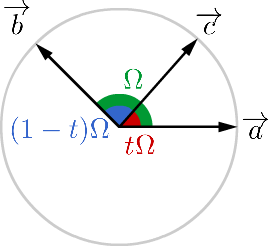
3d vector interpolation. But this is probably not the. Linear interpolation is just linear combination. In 3d computer graphics phong shading is an interpolation technique for surface shading invented by the computer graphics pioneer bui tuong phong. We learn how to create smoothly varying orientation in 3d by interpolating euler angles and quaternions.
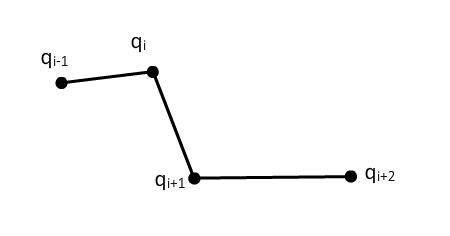
Vq interp3 x y z v xq yq zq returns interpolated values of a function of three variables at specific query points using linear interpolation. It is also called phong interpolation or normal vector interpolation shading. You can express p4 coordinates in the p1p2p3 vector basis. Share cite improve this question follow edited feb 3 12 at 19 48.
51 2k 7 7 gold badges 89 89 silver badges 178 178 bronze badges. Asked feb 3 12 at 19 34. Alpha black 1 alpha red where alpha has to be from interval 0 1. X4 x1 a x2 x1 b x3 x1 y4 y1 a y2 y1 b y3 y1 this is easy to solve linear equation system.
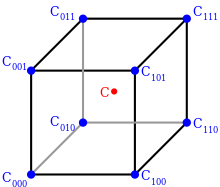
For toolbox version 10 2017 please use unitquaternion instead. The results always pass through the original sampling of the function. And we interpolate. Trilinear interpolation is used to interpolate within the f array for those xout yout and zout triplets that are inside the region specified by x y and z.
X y and z contain the coordinates of the sample points. The 3d lookup method consists of three parts packing or partition extraction or find and interpolation or computation 2packing is a process that partitions the source space and selects sample points for the purpose of building a lookup table. Linear interpolation of three 3d points in 3d space. In the matlab example starting at 5 44 i use the quaternion class.
Pose 0 and pose 1 each can be represented by a rotation matrix and a vector. You have to find a and b coefficients then use them to calculate z coordinate. Z4 z1 a z2 z1 b. And if i understood it right you will interpolate between these vectors in time.
If alpha will be 1 then you will get black vector when alpha is 0 you will get red vector. S is a function of time varies smoothly from 0 to 1 over the duration of the trajectory. So you can just take. Triplets that lie outside the range of x y or z result in na values.
Let s consider two poses. We can convert the rotation matrix of each pose into a unique quaternion and we can interpolate the translation using the linear interpolation formula that we introduced earlier.

Proposed Interpolation Method For Motion Estimation Download Scientific Diagram
Veusz 3 0 Is Actually Veusz 3d
Trilinear Interpolation Wikipedia

Trilinear Interpolation Wikipedia
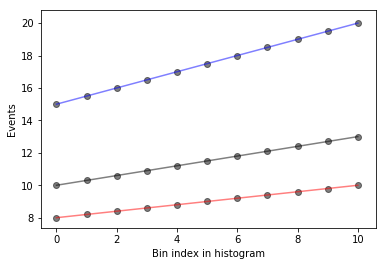
Piecewise Linear Interpolation Pyhf 0 5 2 Documentation

Intrinsic Point Cloud Interpolation Via Dual Latent Space Navigation
Create Elevation Grid From 3d Vector Data

5 Function Fitting And Interpolation Geogg122 Scientific Computing V Release Documentation
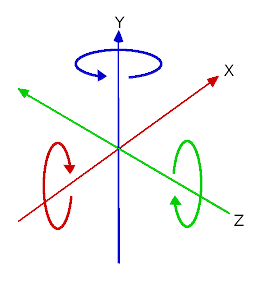
Using 3d Transforms Godot Engine Stable Documentazione In Italiano

How Do I Plot A Vector Field Within An Arbitrary Plane Using Python Stack Overflow
Inverse Distance Weighting Idw Interpolation Gis Geography

6 Illustration Of One Ray Sampling Using Quadrilinear Interpolation In Download Scientific Diagram
